2. Land Cover Validation with LUCAS dataset#
This is an example of a land cover product validation using LUCAS points. The process is using the class Validator to perform the main validation steps.
2.1. Install#
2.1.1. Note for Google Colab#
[ ]:
!git clone https://gitlab.com/geoharmonizer_inea/st_lucas/st_lucas-python-package.git
!(cd st_lucas-python-package/; git pull)
import sys
sys.path.insert(0, './st_lucas-python-package/docs/notebooks/')
2.1.2. Install requirements#
[ ]:
!pip3 install geopandas pyyaml==6.0 ipyleaflet
print("INSTALLATION COMPLETED")
Now we have to restart runtime: Runtime -> Restart runtime (on Google Colab) or Kernel -> Restart (on JupyterLab).
[1]:
import os
import yaml
from osgeo import gdal
from osgeo import gdalconst
import geopandas as gpd
import numpy
import urllib
import matplotlib.pyplot as plt
%matplotlib inline
from validator import Validator
2.2. Land Cover validation#
2.2.1. Configure validation#
Check contents of the config.yaml file.
[2]:
# configuration with sample data
config_file = "sample_land_cover/config.yaml" # On Google Colab: "./st_lucas-python-package/docs/notebooks/sample_land_cover/config.yaml"
with open(config_file, 'r') as file:
file_contents = file.read()
print(file_contents)
project:
name: 'Geoharmonizer Land Cover validation'
abbrev: 'cz_lc_18'
run_id: '20210907'
# land cover & reference definitions
input:
# raster map
path: ./sample_land_cover
in_ras: cz_land_cover_osm_2018.tif
ndv: 0
legend: legend.yaml
# vector reference
in_vec: cz_lucas_points_l1_2018.shp
ref_att: 'label_l1'
# validation report settings
report:
path: ./sample_land_cover
dir_name: 'lc_2018_validation'
# validation points for GIS exploration
validation_points:
file_name: 'validation_points'
ogr_format: 'ESRI Shapefile'
epsg: 3035
2.2.2. Initialize the validator#
Initilize the validator by passing the config file or a Python dictionary with the same structure
[3]:
validation = Validator(config_file)
Validation project initialized!
Inputs:
cz_land_cover_osm_2018.tif
cz_lucas_points_l1_2018.shp
2.2.3. Check validity of the inputs#
[4]:
# Check if you can read the geodata
inputs_valid = validation.check_inputs()
print('Validation data ready: {}'.format(inputs_valid))
Validation data ready: True
[5]:
# Check contents of the raster and vector geodata
with open(config_file) as file:
cfg = yaml.load(file, Loader=yaml.FullLoader)
# Vector data
vector_fn = os.path.join(cfg['input']['path'], cfg['input']['in_vec'])
gdf = gpd.read_file(vector_fn)
gdf.head()
[5]:
| point_id | survey_dat | gps_altitu | gps_lat | gps_long | nuts0 | obs_dist | obs_type | lc1 | lc1_perc | label_l1 | geometry | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 48262936 | 2018-05-10 | 309 | 49.321800 | 16.956880 | CZ | 6.0 | 1 | C33 | 5 | NaN | POINT (4826005.575 2935998.024) |
| 1 | 47162980 | 2018-08-02 | 409 | 49.799533 | 15.492019 | CZ | 22.0 | 1 | B75 | 4 | 3.0 | POINT (4716021.636 2979995.779) |
| 2 | 46183058 | 2018-07-19 | 242 | 50.557290 | 14.193572 | CZ | 0.0 | 1 | B13 | 3 | 2.0 | POINT (4617999.865 3057999.905) |
| 3 | 45262962 | 2018-07-17 | 545 | 49.734924 | 12.844097 | CZ | 0.0 | 1 | B35 | 4 | 2.0 | POINT (4526000.963 2961999.910) |
| 4 | 47463004 | 2018-07-24 | 251 | 49.993666 | 15.933803 | CZ | 0.0 | 1 | B11 | 4 | 2.0 | POINT (4745999.810 3004000.403) |
[6]:
# Check the legend
legend_file = "sample_land_cover/legend.yaml" # On Google Colab: "./st_lucas-python-package/docs/notebooks/sample_land_cover/legend.yaml"
with open(legend_file, "r") as file:
legend = file.read()
print(legend)
legend:
1: Artificial
2: Cropland
3: Perenial
4: Forest
5: Shrubland
6: Grassland
7: Barren
8: Wetlands
9: Water
10: Glaciers
[7]:
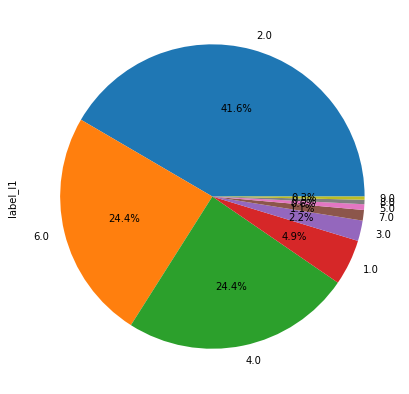
# view distribution of the classes
attribute = cfg['input']['ref_att']
gdf[attribute].value_counts().plot.pie(figsize=(7, 7), autopct='%1.1f%%')
[7]:
<AxesSubplot:ylabel='label_l1'>
[8]:
# Show a map of the data
from ipyleaflet import Map, GeoData, basemaps, LayersControl
gdf_4326 = gdf.to_crs("EPSG:4326")
center = gdf_4326.dissolve().centroid
m = Map(center=(float(center.y), float(center.x)), zoom = 7, basemap= basemaps.OpenStreetMap.Mapnik)
lucas_gd = GeoData(geo_dataframe = gdf_4326,
style={'color': 'black', 'fillColor': '#3366cc', 'opacity':0.05, 'weight':1.9, 'dashArray':'2', 'fillOpacity':0.6},
point_style={'radius': 2, 'color': 'red', 'fillOpacity': 0.8, 'fillColor': 'blue', 'weight': 3},
name='LUCAS points')
m.add_layer(lucas_gd)
m.add_control(LayersControl())
m
/tmp/ipykernel_17328/1624841052.py:6: UserWarning: Geometry is in a geographic CRS. Results from 'centroid' are likely incorrect. Use 'GeoSeries.to_crs()' to re-project geometries to a projected CRS before this operation.
center = gdf_4326.dissolve().centroid
2.2.4. Run land cover map and reference overlay#
[9]:
validation.overlay()
Processed: 100% | 4930 reference points.
[9]:
0
2.2.5. Report the validation results#
[10]:
# short report
validation.short_report()
Validation indicators:
---
Overall map accuracy is 84.16 %
No. passed: 3426
No. failed: 645
No. points used in validation: 4071
[10]:
0
[11]:
# full report
validation.report()
Machine learning validation indicators (per class):
---
precision recall f1-score support
1 0.44 0.84 0.58 185
2 0.86 0.97 0.91 1801
3 0.62 0.13 0.22 61
4 0.93 0.90 0.92 989
5 0.15 0.18 0.16 17
6 0.91 0.63 0.75 952
7 0.62 0.11 0.19 46
8 0.25 0.27 0.26 11
9 0.30 0.33 0.32 9
accuracy 0.84 4071
macro avg 0.56 0.49 0.48 4071
weighted avg 0.86 0.84 0.84 4071
Classical LC validation indicators:
---
overall_accuracy : 0.8416
producers_accuracy : 0.8583
users_accuracy : 0.8416
kappa : 0.7670
[11]:
0
[12]:
# Save the validation report to a text file for a future use
validation.save_report()
Saving validation report:
---
cz_lc_18_validation_report.txt
[12]:
0
2.2.6. Plot confusion matrix#
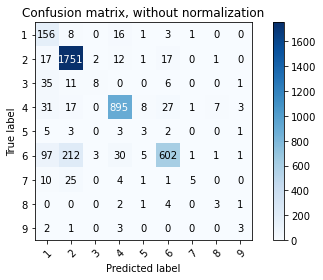
[13]:
validation.show_confusion_matrix()
[13]:
0
[14]:
# Check the legend again
print(legend)
legend:
1: Artificial
2: Cropland
3: Perenial
4: Forest
5: Shrubland
6: Grassland
7: Barren
8: Wetlands
9: Water
10: Glaciers
[15]:
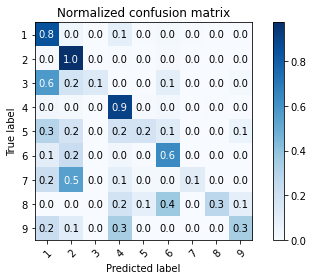
# Save the confusion matrix
validation.save_normalized_confusion_matrix()
[15]:
0
[16]:
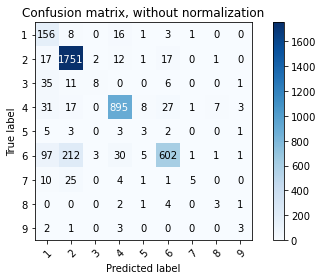
# You can also save the plots into the validation directory for later use
validation.save_confusion_matrix()
validation.save_normalized_confusion_matrix()
[16]:
0
2.2.7. Save the validation overlay geodata to a vector#
You can
[17]:
validation.save_vec()
Saving validation data:
---
Vector data: validation_points.shp created from overlay data
[17]:
0
2.2.8. Classes aggregation#
[18]:
config_aggregation = {
'project':
{'name': 'Geoharmonizer Land Cover validation',
'abbrev': 'cz_lc_18',
'run_id': '20210907'
},
'input':
{'path': './sample_land_cover',
'in_ras': 'cz_land_cover_osm_2018.tif',
'ndv': 0,
'legend': 'legend.yaml',
'in_vec': 'cz_lucas_points_l1_2018.shp',
'ref_att': 'label_l1'
},
'report':
{'path': './sample_land_cover',
'dir_name': 'lc_2018_validation_aggregation'
},
'validation_points':
{'file_name': 'validation_points',
'ogr_format': 'ESRI Shapefile',
'epsg': 3035
}
}
[19]:
validation_lc_aggregated = Validator(config_aggregation)
Validation project initialized!
Inputs:
cz_land_cover_osm_2018.tif
cz_lucas_points_l1_2018.shp
[20]:
# 2: agriculture (arable land & grassland)
aggregartion = {
2: [2, 6]
}
[21]:
validation_lc_aggregated.overlay(aggregartion)
Processed: 100% | 4930 reference points.
[21]:
0
[22]:
validation_lc_aggregated.report()
Machine learning validation indicators (per class):
---
precision recall f1-score support
1 0.65 0.90 0.76 174
2 1.00 1.00 1.00 3113
3 1.00 0.18 0.31 44
4 0.97 0.95 0.96 945
5 0.21 0.25 0.23 12
7 0.71 0.25 0.37 20
8 0.30 0.43 0.35 7
9 0.33 0.38 0.35 8
accuracy 0.97 4323
macro avg 0.65 0.54 0.54 4323
weighted avg 0.97 0.97 0.97 4323
Classical LC validation indicators:
---
overall_accuracy : 0.9683
producers_accuracy : 0.9735
users_accuracy : 0.9683
kappa : 0.9267
[22]:
0
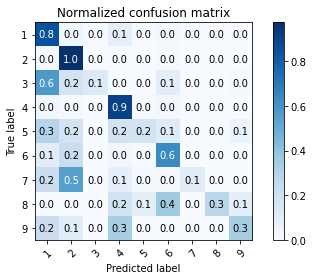
[23]:
validation_lc_aggregated.show_confusion_matrix()
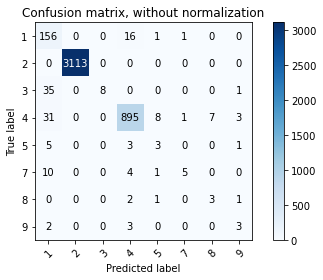
[23]:
0